Research
It is often the case that real-world systems have nonlinear dynamics and many degrees of freedom, and yet the desired system control tasks are often low-dimensional. My research focuses on novel methods for using feedback control to impose constraints on such high-dimensional systems, in a manner that achieves the desired synergistic effect of coordinated motion. The contexts of interest are multi-agent systems (control of collectives) and biped robotics. To facilitate identification and tracking of neighboring agents and points of interest in the traffic infrastructure, a more recent aspect of my research has focused on methods for encoding time-varying information in reflection patterns scanned by lidar systems.
Encoding Information in Lidar Reflection Patterns
For autonomous vehicles such as self-driving automobiles or mobile robots to navigate complex environments, it is necessary to obtain a wide range of information about the surrounding area. While some of that information is situation-dependent, such as the presence and intentions of a pedestrian preparing to cross the street in front of a vehicle, other information can be viewed as a more permanent part of a traffic infrastructure. For example, a vehicle needs to gather information about freeway on-ramps, speed limits, temporary lane closures, and detours. In a military environment, a vehcile may need to know that it has reached a particular checkpoint. Vehicles typically obtain this type of data through a combination of external information sources, such as the satellite-based Global Positioning System (GPS), and onboard sensors such as radar, Lidar, and cameras. Each of these methods has particular advantages but also certain limitations. GPS can be denied or spoofed, and vision-based systems can be degraded by weather. The purpose of my research is to introduce methods to encode such data in a type of “digital sign” which a vehicle can read with its Lidar system.
Lidar-readable Rotational Barcodes
One method I have developed fo encode data in Lidar reflection patterns is the Lidar-readable Rotational Barcode, which is a target constructed as a barcode-like pattern of alternating strips of reflective and non-reflective material wrapped around a rotating cylinder. 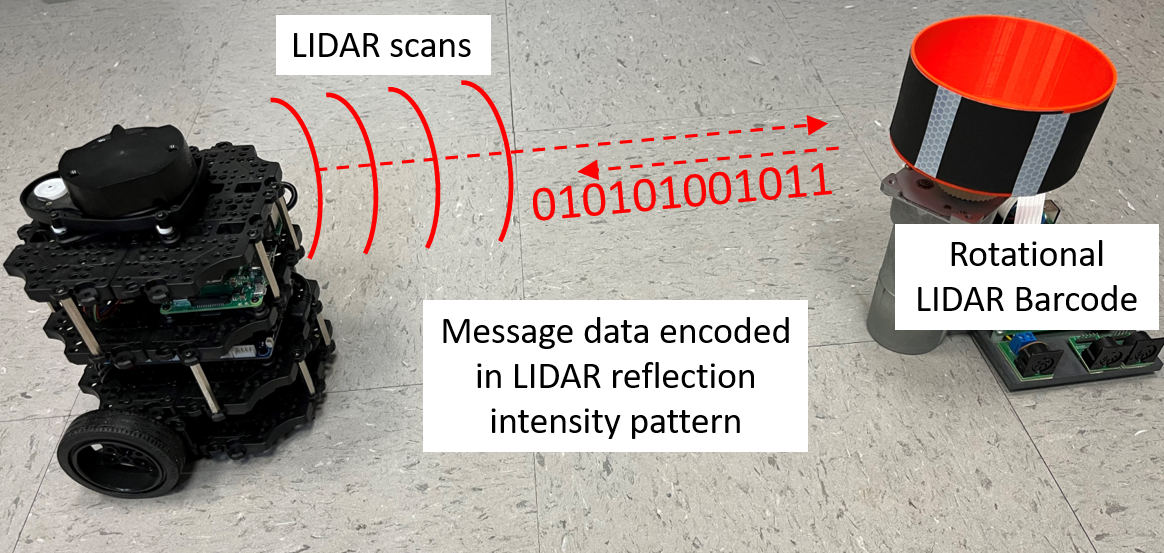
The widths of the strips can be arranged to encode a binary pattern to represent data, similar to the standard UPC barcodes that are used in product identification. When the barcode target is wrapped around a cylinder and mounted on top of a DC motor rotating at a constant speed, a mobile vehicle equipped with a Lidar scanner can analyze the Lidar return intensity (also known as reflectivity or reflectance) along bearing angles directed towards the barcode over time to effectively scan the barcode data. The rotation rate of the barcode can be tuned to provide desired time-based sampling resolution of the message. The rotation of the barcode also creates a unique spatiotemporal signature in the sensor data, which enables detection in a cluttered environment by analysis of the statistics of the intensity data. 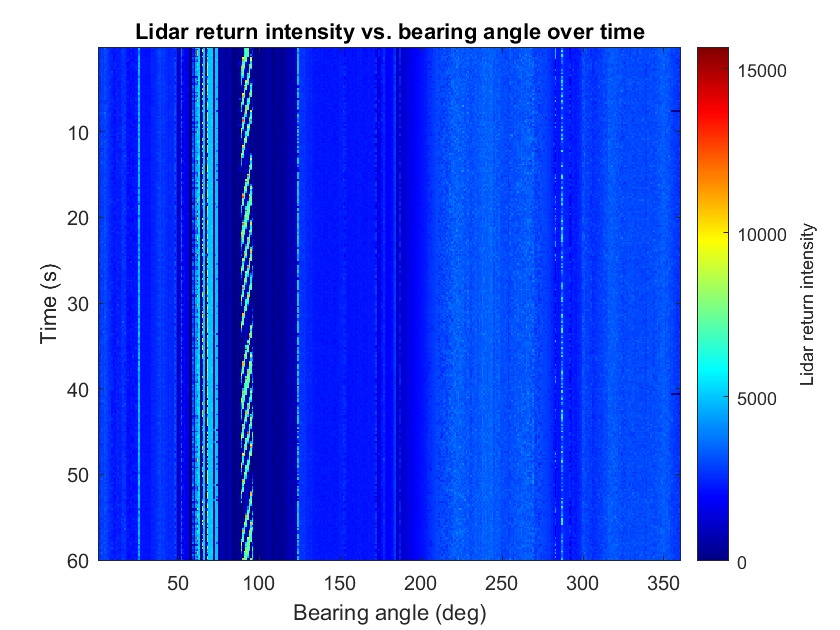
Ongoing work is focused on methods for detecting and decoding the barcode information in the situation with relative motion between vehicle and target.
Collective Control
I am interested in decentralized methods for controlling the motion of flocks/swarms/collectives of autonomous agents, with inspiration from biology and an eye towards implementation in technology. My approach has centered on feedback-based pursuit strategies, i.e. using feedback control to implement pursuit behavior between agents at the local level to generate coordinated collective motions at the group level. This approach could be used to deploy and position sensor networks for mapping environmental features or to perform autonomous search and rescue with a team of UAVs, and it has the advantage of being decentralized and reconfigurable.
Cyclic pursuit
Much of my work has centered around a cyclic pursuit framework (i.e. agent i pursues agent i+1 modulo n , for an n -agent system) in which each agent uses a feedback law which implements a constant bearing (CB) pursuit strategy. Tools of symmetry and reduction aid in the analysis of the dynamics, revealing the existence of an invariant and attractive submanifold. Analysis of the reduced dynamics on this invariant manifold has yielded necessary and sufficient conditions for existence of certain special system trajectories such as circling and rectilinear equilibria, shape-preserving spirals, and pure expansion/contraction. (Click on the videos below to see an example of each type.)
Beacon-referenced Pursuit
Many tasks require autonomous agents to orbit a specified location while maintaining a fixed formation shape and scale, such as search and rescue, environmental sensing, and surveillance. In work with Biswadip Dey (Princeton University) on beacon-referenced cyclic pursuit, I introduced a modified version of the CB control law, in which the pursuer is attentive to both a neighboring agent as well as to a beacon (which is assumed to be fixed). Though the control law is not designed to stabilize a particular station-keeping range from the beacon, we demonstrated that in an n-agent collective where each agent i employs this ``beacon-referenced'' CB control law with respect to agent i+1 and a common beacon, circling equilibria exist which are centered on the beacon position and have a radius determined by the control parameters. This work may also provide insights into the mechanisms underlying collective behavior observed in nature such as the ``explore-exploit'' behavior evidenced by some animal collectives (e.g. honeybees) searching for food sources. The video below shows an experimental implementation (thanks to B. Dey and U. Halder) with five mobile robots engaged in beacon-referenced cyclic pursuit.
Biped Legged Locomotion
Biped legged locomotion is a fascinating and challenging research area which is appealing in both the theoretical and experimental contexts, and it has important applications in development of prosthetics as well as producing robots that could replace humans in hazardous tasks such as shipboard firefighting. Robotic bipeds are often high-dimensional underactuated systems, and the impulsive nature of ground impact introduces a hybrid nature to the system dynamics. Stability is a major challenge for two-legged robotic walkers, often solved by outfitting the robot with large feet and then using controllers which ensure that the center of mass (and its extension the zero moment point) stays within the support polygon. An alternative method for dynamic stabilization of walking gaits was introduced by Westervelt, Grizzle and Koditschek with the notion of hybrid zero dynamics. Under certain conditions, a lower-dimensional zero dynamics manifold exists and is invariant under both the continuous dynamics and the impulsive discrete dynamics, and the HZD theory prescribes conditions under which exponential stability of a periodic orbit of the zero dynamics implies exponential stability of the corresponding periodic orbit of the full dynamics. Optimization routines can be utilized to design system trajectories on the zero dynamics manifold which correspond to desired walking gaits, and then controllers are chosen to drive the system to the zero dynamics manifold by zeroing corresponding output functions. The HZD method lends itself to the design of provably stabilizable periodic walking gaits, and has been implemented and verified experimentally, most notably on the five-link bipedal walker MABEL .
Control Lyapunov Function (CLF) Controllers for Biped Locomotion
Until recently, the majority of HZD controllers have utilized some form of PD control to zero the output functions and drive the system to the zero dynamics manifold. During my postdoctoral research, I led the Michigan contingent of a multi-university research effort to develop an alternative method based on control Lyapunov functions (CLF), thereby extending the class of stabilizing controllers to include a class which are Lipschitz continuous but not necessarily continuously differentiable. One form of the CLF control approach has the additional advantage of providing a method to appropriately incorporate saturation constraints into the calculation of the feedback control (rather than simply calculating the theoretically ideal control input and then applying saturation constraints at the end). I led the experimental verification of the CLF control method on MABEL, demonstrating that it can improve performance by generating smoother and less noisy torques than other control methods. (See video below.)
Quadratic Programming for Handling Torque Saturation
Implementation of any control strategy in the experimental setting must contend with the effects of actuator limits. Limits for control inputs are typically imposed by the user to ensure that motor torque specifications are not exceeded. When the calculated ideal control effort frequently exceeds the prescribed bounds and must therefore be truncated, the controller performance is degraded and theoretical performance measures may be violated. More importantly, when a control input is saturated, the system runs in open-loop and is no longer able to respond to increasing errors in tracking, often leading to eventual failure. In work with Koushil Sreenath, Aaron Ames, and Jessy Grizzle, a method was developed to use quadratic programming (QP) to incorporate torque saturations into calculation of the CLF control approach described above. In the context of biped robotics, this work enables gradual performance degradation while still maintaining walking locomotion under a range of stringent torque limits, as demonstrated in the video below.